|
Práctica 2:
Documentación
|
INTRODUCCIÓN
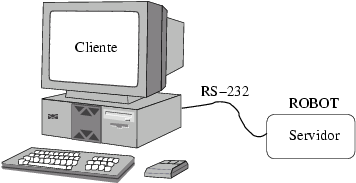
La arquitectura que se propone
es la siguiente. En el microcontrolador 68hc08 se ejecuta un programa
servidor (o monitor) que ofrece las siguientes servicios a través
del interfaz de comunicaciones serie:
PING. Permite
comprobar si hay conexión física con el robot
IDENTIFICACION. Para
determinar el tipo de servidor y sobre qué micro se ejecuta.
No lo usaremos.
LOAD. Lectura de un
byte del mapa de memoria del micro.
STORE.
Escritura de un byte en una dirección del mapa de memoria.
Este
servidor se llama servidor genérico. A través de
él tenemos total acceso al mapa de memoria del 6808, pudiendo
leer y escribir valores en cualquier posición, entre ellas los
puertos de E/S. Se puede encontrar más
información en esta página
El
servidor se puede bajar de aquí. Hay
que grabarlo en la GPBOT y construirse un cable serie para
comunicarse con el PC.
Hardware
Cable para
comunicaciones serie
Será
necesario construirse un cable para conectar la GP-BOT al PC. Este
cable tendrá por un lado un conector DB9 hembra y por
el otro un conector Molex de 3 vías (es el que se
conecta a la GPBOT).
|

|
|
|
Conector
hembra DB9
|
Conector Molex
para enchufar a la GPBOT
|
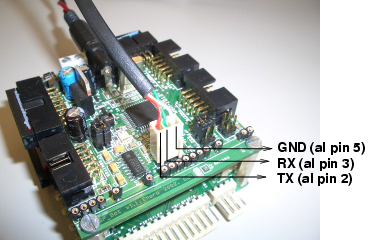
Se puede utilizar
cualquier tipo de cable serie. Algunos tienen cable “normal”,
otros de tipo telefónico y otros cable plano de bus.
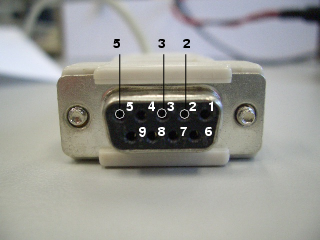
Independientemente del cable empleado, las conexiones tienen que ser
como se indica a continuación: el PIN 5 se conecta a
GND, el 3 a RX y el 2 a TX de la
GPBOT.
|
|
|
|
Pines a
conectar del DB9
|
Conexión
con el Molex y la GPBOT
|
Una vez construido
el cable, conviene medir con un polímetro si las
conexiones son las correctas, antes de conectarlo tanto al PC
como a la GPBOT.
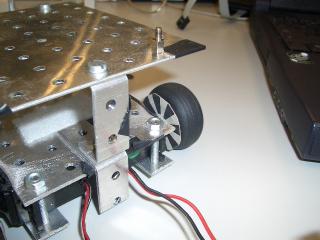
Dos encoders
Uno en cada rueda.
Se puede encontrar más información en la página
del profesor Javier de Lope. Los
encoders son unos discos (en nuestro caso de papel o cartón
valen) que se pegan en el interior de las ruedas y por medio de
sensores de tipo CNY70 podemos saber cuánto se ha movido el
robot (o cuánto ha girado).
Dos sensores
CNY70
Hay
que montar dos sensores CNY70, igual que se hizo en la práctica
1. Se emplearán para la lectura de los encoders.
SOFTWARE
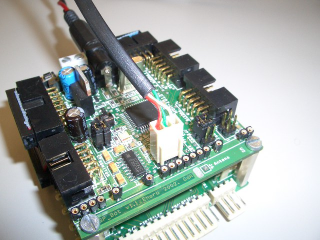
En
el 68hc08 hay que grabar el servidor
genérico. Las fuentes, su funcionamiento y las tramas se
pueden
encontrar aquí.
Desde un terminal se puede
comprobar si el servidor está respondiendo. Desde Linux se
puede usar el minicom. Hay que usar la siguiente configuración:
(desde Windows se puede usar el Hyperterminal y desde Linux el
minicom). Establecemos la configuración a 9600 Baudios,
8 bits de datos, 1 de Stop y sin paridad (Es la
configuración típica). Para ver si responde hay que
enviar una trama de PING, que simplemente es enviar el
carácter 'P'. El servidor responderá devolviendo la
trama PONG (carácter 'O').
El
software de comunicación es sencillo. Tiene que abrir el
puerto serie, construir las tramas, enviarlas y esperar las
respuestas. Todo esto está implementado en la librería
Stargate., que está instalada en el laboratorio. También
hay un cliente gráfico, el star-generic.
Ambas amplicaciones están programadas en C.
[Página principal del
laboratorio]
Juan
González Gómez,
2004,2005
(1)
Iván González.
2002.
Se
conceden permisos para copiar, distribuir y modificar la información
contenida en esta página siempre y cuando se mantenga esta
nota
Última
modificación: 1-Marzo-2005