|
Práctica 1: Documentación |
|
|
Material necesario:
Motores: usaremos servos del tipo Futaba 3003 o compatibles, trucados para que puedan girar 360 grados. Proporcionados por la escuela (no hay para todos).
Sensores de infrarrojos CNY70. En el robot se utilizarán 2, pero en las siguientes prácticas se necesitarán otros 2.
Cables, para los motores y sensores.
Conectores molex de 2 y 4 vías, para la conexión de los sensores y motores a la tarjeta GPBOT. Son necesarios 2 de 2 vías y 2 de 4 vías, aunque de estos últimos se recomienda comprar 2 más, ya que serán usados en las siguientes prácticas.
Estructura mecánica: aluminio, pvc, metacrilato, lego, etc... Algunas estructuras será proporcionadas por la escuela, pero no hay para todos los grupos.
Electrónica: tarjetas GPBOT y GP_IFAZ. Proporcionadas por la escuela, aunque no hay para todos los grupos.
Cable de alimentación para la GPBOT. Para no gastar baterías, es mejor conectar el robot a la fuente de alimentación del laboratorio, utilizando un cable que bananas por un extremo y un conector jack macho por el otro. Existen cables de estos en las peceras, que podéis solicitar (aunque lo mejor es que os los construyáis vosotros mismos).
Herramientas:
En este laboratorio se va a “cacharrear” mucho. Es recomendable que los alumnos traigan sus propias herramientas. Las que utilizaremos principalmente serán:
Soldador y estaño. Necesario para la conexión de los sensores y los motores.
Alicates, para cortar cables
Juego de destornilladores pequeños, de cabeza plana y en estrella
Construcción del robot
Esta práctica se realizará en dos fases:
FASE
1:
Construcción del Robot. Tareas a realizar:
Trucaje de los servos (si es necesario).
El robot funcionará con motores de corriente contínua (cc). Estos motores son muy baratos, sin embargo tienen el inconveniente de que giran muy deprisa. Es necesario utilizar una serie de engranajes para conseguir una menor velocidad y una mayor fuerza. Una solución muy empleada es utilizar servomecanismos, como por ejemplo los Futaba 3003 o compatibles, que se pueden conseguir en cualquier tienda de aeromodelismo. Para convertirlos en motores de corriente contínua normales, es preciso “trucarlos”. Para ello hay que abrirlos, eliminar la electrónica interna y los topes mecánicos y soldar un par de cables. Todo el proceso está descrito aquí (La escuela puede dar en régimen de prestamos un par de servos Hitec para todos aquellos que lo sociliten, aunque no hay para todos los grupos).
Conexión a la GP_IFAZ. Una vez trucado, tendremos un motor del que salen dos cables. Hay que soldar un conector molex de 2 vias para que se pueda conectar a la tarjeta GP_IFAZ.
Aquí se muestra una foto de un servo ya trucado. Salen dos cables:
|
|
Ahora se construye el conector molex:
|
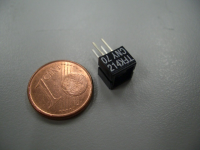
Paso 1: Elementos necesarios |
Paso 2: Soldar los conectores machos |
Paso 3: Insertar los cables |
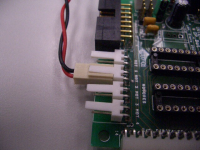
Ahora ya podemos conectar el motor directamente a la tarjeta GP_IFAZ:
|
|
Conexión de los sensores CNY70 a la GP_IFAZ
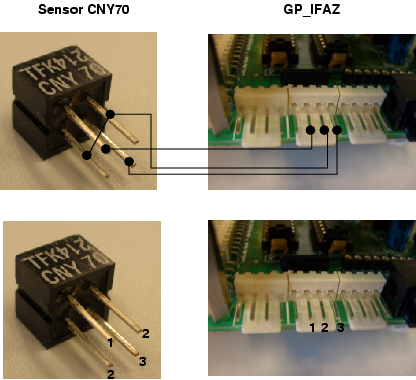
Los sensores de infrarrojos CNY70 son como se muestra en la foto inferior izquierda. Para poderlos conectar a la GP_IFAZ hay que soldar cables y colocar un conector molex de 4 vías (foto central). La foto de la derecha muestra un sensor terminado.
|
|
|
|
En el siguiente esquema se muestra cómo construir el cable para la conexión. De las 4 patas del cny70, dos de ellas están conectadas entre sí. En total deberán salir 3 cables que lleguen al conector molex hembra, que es el que se conecta a la GP_IFAZ
|
|
Estructura mecánica
Se pueden usar planchas de aluminio, de plástico, PVC, madera, etc. También se puede construir el robot con piezas de Mecano, Lego o equivalentes. Exiten estructuras ya diseñadas para prestarse, sin embargo no hay suficientes para todos los grupos. Se recomienda que todos aquellos que quieran quedarse con el robot al finalizar las prácticas, opten por construirse su propia estructura mecánica. Además serán necesarias dos ruedas de goma.
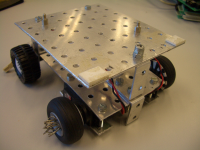
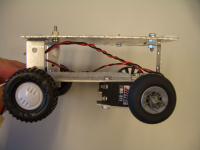
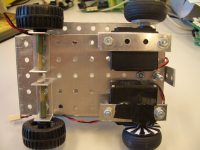
En estas fotos puedes ver la estructura del UAMBOT, diseñada por Guillermo. Con dos planchas de mecano (o similares), dos motores y algunas ruedas es suficiente para tener el robot móvil mínimo.
|
|
|
|
Aquí puedes ver la estructura del microbot Tritt, hecha con Lego.
Aquí está Siko, un robot que utiliza orugas, diseñado por Jose Pichardo, estudiante en la Escuela de Ingeniería de Cádiz (UCA)
FASE 2: Programación del robot para seguir una línea negra.
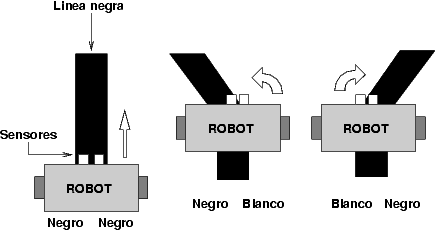
El Algoritmo se muestra gráficamente en el siguiente dibujo:
|
|
Cuando los sensores leen negro, el robot debe avanzar. Cuando llega una curva a la izquierda, uno de los sensores se saldrá y el otro permanecerá dentro de la línea, leyéndose negro-blanco. En ese caso habrá que girar el robot hacia la izquierda. Cuando hay una curva hacia la derecha, los sensores leen Blanco-negro, por lo que hay que girar hacia la derecha.
Existen otro algoritmos, como por ejemplo seguir uno de los extremos de la línea. Podéis implementar el que queráis.
Información:
Datasheet del 68HC08GP32: Especificaciones técnicas del microcontrolador 6808.
Manual de programación del sistema GPBOT: Ejemplos de programación, set de instrucciones, etc...
[Página principal del laboratorio]
Juan González Gómez, 2004,2005
Se conceden permisos para copiar, distribuir y modificar la información contenida en esta página siempre y cuando se mantenga esta nota
Última modificación: 21-Feb-2005