OBJETIVO
El objetivo de esta práctica es establecer una comunicación entre el robot y el PC. Para ello, y partiendo del desarrollo realizado en la práctica anterior, un robot seguidor de línea, deberemos hacer que nuestro robot siga un circuito y comunique al PC el recorrido realizado. El resultado será un dibujo del recorrido (aproximado).
MECANISMO DE ENCODERS
Para obtener una referencia del movimiento del robot implementaremos un mecanismo de encoders los cuales mediran el desplazamiento realizado por el robot a partir del desplazamiento realizado por las ruedas del mismo. Conociendo el sentido del movimiento de robot, adelante, atrás (poco probable), izquierda o derecha, informaremos de la cantidad de desplazamiento en cada maniobra al PC lo cual nos servirá para dibujar en el PC la ruta seguida por el robot.
A la hora de diseńar los encoders no es necesario que tengan una gran precisión (como se comenta en el documento, se trata del número de divisiones del disco) porque el circuito de prueba será bastante sencillo.
COMUNICACIÓN
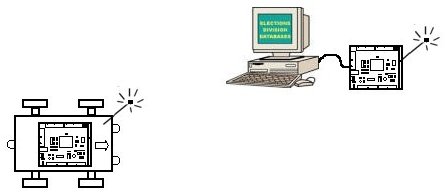
El medio de comunicación seleccionado para esta práctica será el de radio. Para ello, se incluirá en el programa del robot un conjunto de rutinas que permitan al robot emplear el módulo de radio que incorpora la GP_Bot. Es además necesaria, una segunda placa también con módulo de radio, que estándo comunicada por el puerto serie con un PC, recibe la información enviada por el robot.
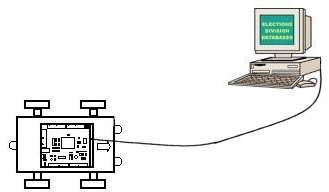
Debido a esta necesidad de una segunda placa y a la posibilidad de colisiones que se pueden dar debido al uso de la misma banda de frecuencia en la comunicación por radio o a interferencias en el lugar donde se esté realizando la práctica, se realizará una primera aproximación mediante un cable serie, de modo tengamos conectado el robot al PC por dicho puerto.
Cable de 3 hilos para realizar el cable para el puerto serie, con una longitud razonable. Además de un conector de 9 pines y un conector tipo molex de 3 o de 4 conexiones. En su defecto un cable serie con un extremo libre para poner el conector molex. Rutinas de comunicación por el puerto serie para la placa (disponibles en breve y se explicarán en clase). Rutinas de comunicación serie para PC y compatibles con la platarforma software en la que vayaís a dibujar el recorrido (windows, linux, ms-dos, etc.). Construir el mecanismo de encoders visto en el documento anterior. Este consta de dos nuevos sensores CNY70 y las bandas circulares para las ruedas, así como un programa para adquirir la información.
żY la radio?
Aquellos grupos que hayan finalizado correctamente su práctica tendrán la posibilidad de incorporar las rutinas de comunicación radio. La adaptación al sistema anterior es mínima.