El objetivo de esta sección es llevar un breve resumen de
lo que se ha realizado en las prácticas asi como dar información
de los requerimientos para el siguiente día de prácticas, de
cara a aquellos grupos que quieran adelantar trabajo.
RESUMEN DIA 5 DE MARZO DE 2002
En este segundo día el objetivo era comenzar a poner en marcha los motores. Inicialmente había que probarlos y comprobar no solo que funcionasen, sino realmente su rendimiento: velocidad, fuerza y sobretodo, la cantidad de voltaje con los que alimentarlos. Además se pretendía presentar el sistema de control y el sensor CNY70, con el cual nuestro robot puede comenzar a seguir la línea.
Ha sido un grata sorpresa que un gran número de grupos ya haya traido montados los motores e incluso los CNY70 y que haya sido posible la entrega de algunos sistemas de desarrollo e incluso, la conexión y puesta en marcha de algunos motores desde la placa.
Temas tratados hoy:
Sistema de desarrollo GP_Bot: Breve descripción de la placa que vamos a emplear durante las prácticas. Se ha comentado la necesidad de tener especial cuidado con la alimentación de la placa (fijarse que existe un dibujo de un '+' para señalar cual es el conector positivo de la clema de alimentación) y la disponibilidad de los manuales de su manejo (mirar referencia del día anterior) que es muy importante leer antes de nada. Os recuerdo que debeís comprar un cable para alimentar la placa desde la fuente de alimentación, o en su defecto, disponer de alguna batería o cargados de pilas. Motores: Breve explicación de que dispositivo de nuestro sistema maneja los motores y como se controlan estos desde la placa. Como resumen mejor echar un vistazo al manual de programación, donde se detalla un ejemplo de utilización de motores, incluido, un ejemplo de código.
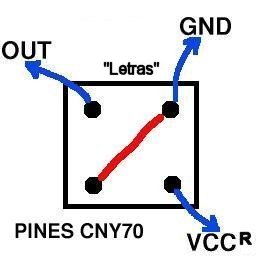
Se comentó la posibilidad de poder alimentar a los motores con otra fuente de alimentación (pila, batería, etc.) distinta de la alimentación del micro. Para más información, consultar el manual de usuario del sistema de desarrollo. La conexión de los motores con la GP_Bot se realiza mediante conectores tipo molex de 2.Sensor CNY70: Breve descripción del funcionamiento del sensor CNY70, incluida una explicación de cada uno de sus pines y como se conectan estos a la GP_Bot. Es importante tener en cuenta esto a la hora de conectarlo a la placa para evitar dañar el sensor. Al mismo tiempo os recuerdo que el número de sensores necesarios es de dos y que estos se colocan juntos y paralelos al eje del motor, un poco por delante del mismo. Los conectores que hay que comprar para conectar los CNY70 a la GP_Bot son los molex de 4.

¿Que puedo ir haciendo?
Lo más importante es leerse la documentación sobre el sistema de desarrollo. Comprar material: Comprar el sensor CNY70: disponible documentación sobre el mismo en la web del Club de Robótica-Mecatrónica. Comenzar a familiarizarse con el entorno de programación: Obtener el entorno ICS08GP Software for 68HC908GP20/GP32 de aquí y seguir el manual de programación en lo que se refiere a conocer el ensamblador del 68HC08 y el entorno. Para aquellos que tengan placa: Comenzar a controlar los motores. Sería interesante que el próximo día algunos de vosotros tuvieraís ya los motores de robot controlados, y mucho mejor, que vuestro robot fuese capaz de realizar una secuencia mínima de movimientos. Recordar que es necesario añadir un bucle de retardo entre cada orden de movimiento para que el robot tenga tiempo para moverse un poco. Esta retardo depende de los motores del robot, su peso, etc.
¿Que haremos el proximo día?
Vuelvo a hacer incapié en que es necesario que todo el mundo tenga la estructura, motores y ruedas preparados. Apenas os quedan unos días para entregar la primera práctica y cuanto antes le cojaís el truco a esto mejor. Hacer que el robot siga una línea es muy fácil, pero primero hay que tener el robot. Suponiendo que todos tengáis los motores controlados, comenzareís a manejar el CNY70. Resolveremos todas las dudas sobre motores y sobre el sensor CNY70. Debeís tener en cuenta que este es el último día antes de la entrega de la primera práctica, el día 19, del cual también dispondreís para terminar la práctica, aunque espero poder ir evaluando a la gente que lo tenga más adelantado. Todo el mundo debería disponer del sistema de desarrollo para comenzar a realizar pequeñas pruebas con los motores.
RESUMEN DIA 26 DE FEBRERO DE 2002
En este primer día el objetivo era que todos los grupos hubieran traido montada la estructura del robot y los motores. Con esta idea, se procedería a explicar el entorno de programación y el manejo de los motores. Aquellos grupos que tuvieran todo montado podrían solicitar la placa para comenzar a trabajar durante esta semana.
Temas tratados hoy:
Entorno de programación: Breve descripción del entorno de programación para el micro GP32 de Motorola. Mas información en el manual de programación. Utilización de la fuente de alimentación: Manejo de la fuente de alimentación de las aulas con el objetivo de poder alimentar correctamente la placa. Se recuerda que el voltaje para alimentar las placas debe ser estar entre 7,5 y 12 V. Observación: Las nuevas placas pueden requerir un límite inferior más bajo (se comentará). Creación de grupos. Trucado de servos: Para aquellos que trajeron servos Futaba (o compatibles) se truco uno como ejemplo. Para más información consultar en el libro "Microbotica" (disponible en la biblioteca) o aquí.
¿Que puedo ir haciendo?
Leer la siguiente documentación: Datasheet del 68HC908GP32: disponible en reprografía (4 paginas por cara), o en formato pdf. Manual de usuario del sistema de desarrollo GP_Bot: disponible en formato pdf. Manual de programación del sistema de desarrollo GP_Bot: disponible una versión "inicial" en formato pdf. Comprar material: Comprar el sensor CNY70: disponible documentación sobre el mismo en la web del Club de Robótica-Mecatrónica. Comenzar a familiarizarse con el entorno de programación: Obtener el entorno ICS08GP Software for 68HC908GP20/GP32 de aquí y seguir el manual de programación en lo que se refiere a conocer el ensamblador del 68HC08 y el entorno. Solicitar placas: Para aquellos que ya quieran comenzar a utilizar la placa, la pueden solicitar al profesor de teoría (existe un número limitado, a esperas de que lleguen en breve las nuevas placas). Comenzar con el control de los motores: Los motores se conectan a la placa mediante conectores "de tipo molex" de 2. Una vez unidos al motor se deben conectar estos a la placa GP_Bot_Ifaz y seguir el ejemplo del manual de programación.
¿Que haremos el proximo día?
Es necesario que todo el mundo tenga la estructura, motores y ruedas preparados. Presentación de la placa y documentación asociada (mencionada en el apartado "¿Qué puedo ir haciendo?"). Pondremos los conectores tipo molex a los motores para poder conectarlos al sistema de desarrollo. Chequeo del funcionamiento de los motores y programación de los mismo siguiendo el ejemplo del manual de programación. Explicación del sensor CNY70.