
|
Cuaderno de laboratorio 2: Monitorizando desde el PC |
|
|
Conexión con la GPBOT
Una montado el cable serie hay que comprobar que funciona correctamente y que nos podemos comunicar con el servidor que se encuentra grabado en la gpbot.
Descargar el servidor y grabarlo en la flash: $ gpbot-down sg-generic-6808-gpbot-0.S19
Bajar el paquete practica2.tgz
Descomprimirlo: $ tar vzxf practica2.tgz
Entrar en el directorio: $ cd practica2
Compilar los programas de ejemplo: make
Conectar la GPBOT al PC usando el cable serie construido. Alimentar la placa y ejecutar el programa de prueba:
Este ejemplo está constantemente haciendo “pings” al servidor. Si la conexión es correcta, se moverá una barra en la parte inferior. Si se quita la alimentación o el cable, la conexión se pierde y aparecerá el mensaje:
Conexión perdida!
Si se vuelve a alimentar la placa o a conectar el cable, volverá a restablecerse la conexión y la barrita continuará moviéndose.
Prueba de los sensores
Como ejemplo de prueba para acceder a la gpbot desde el PC, ejecutar el programa test2, que se encuentra en el mismo paquete practica2.tgz
Si la conexión se establece correctamente, aparecerá lo siguiente:
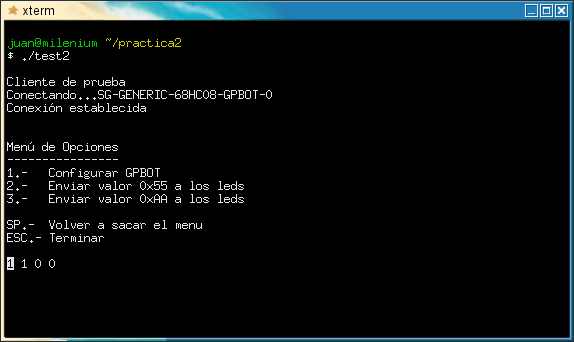
En la parte inferior se puede ver el estado de los 4 sensores, que se están constantamente monitorizando. Apretando las teclas 1,2 y 3 se tiene acceso a las opciones del menú. Con las opciones 2 y 3 se envían los valores 0x55 y 0xAA respectivamente a los leds conectados al puerto B. Es un ejemplo de cómo acceder a ellos desde el PC.
Si se pulsa el reset de la gpbot (o se quita la alimentación), los registros de la gpbot se inicializan y se pierde el acceso a los sensores y al puerto B. Al volverse a establecer la conexión es necesario volver a configurar el puerto B como salida y los sensores como entradas. Esto se hace con la opción 1
[Página principal del laboratorio]
Juan González. 2005.
Última modificación: 28 Marzo de 2005